BASICクラスLESSON3も新しいロボットを組み立てます。
今回のロボットはタイヤの位置が今までと大きく違うので、ロボットの動きも少し変わってきます。
また今回は新しいパーツ「超音波センサー」を使います。
これで壁までの距離を測ることができるようになり、壁にぶつかる前に曲がったり、バックしたりできるようになります。

今回のミッションではスタートから直進し、壁にぶつからずに2回曲がって戻ってこなければいけません。
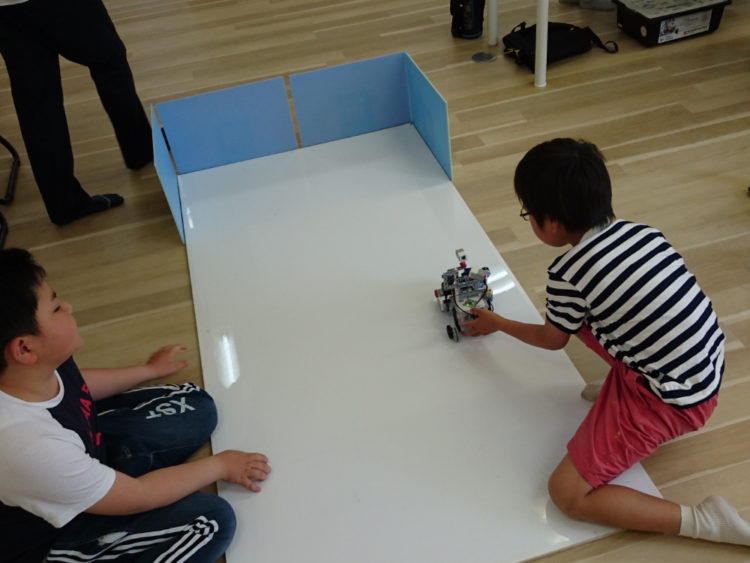
しかし、今回ミッションでは、コース台に問題があって、曲がる動きが安定しませんでした。
そのため、かなり難しいミッションとなってしまいました。
1チームだけ何とかミッションクリアできましたが、他のチームはクリアできませんでした。
とりあえず、プログラミングは全チーム理解できてるようだったので一安心です。
すみません、次回までには新しいコース台を用意しておきます!